



一、机器人编程基础
Arduino:适合入门级机器人开发,易于上手,社区支持丰富。
Raspberry Pi:功能强大,适合复杂项目,可以运行多种操作系统。
ROS(Robot Operating System):适用于大型机器人项目,提供丰富的工具和库。
C++:性能高,适合对实时性和效率要求较高的机器人控制程序。
Python:易于学习和使用,适合快速开发和原型设计。
二、经典机器人程序代码示例
1. 机器人走“∞”字形
java// 定义电机控制函数void moveMotor(int motorPin, int speed) {
analogWrite(motorPin, speed);}void setup() {
// 初始化电机控制引脚
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);}void loop() {
// 按照“∞”字形路径行走
moveMotor(9, 128); // 电机1向前
moveMotor(10, 128); // 电机2向前
delay(1000); // 延时1秒
moveMotor(9, 0); // 电机1停止
moveMotor(10, 128); // 电机2向前
delay(1000); // 延时1秒
moveMotor(9, 128); // 电机1向前
moveMotor(10, 0); // 电机2停止
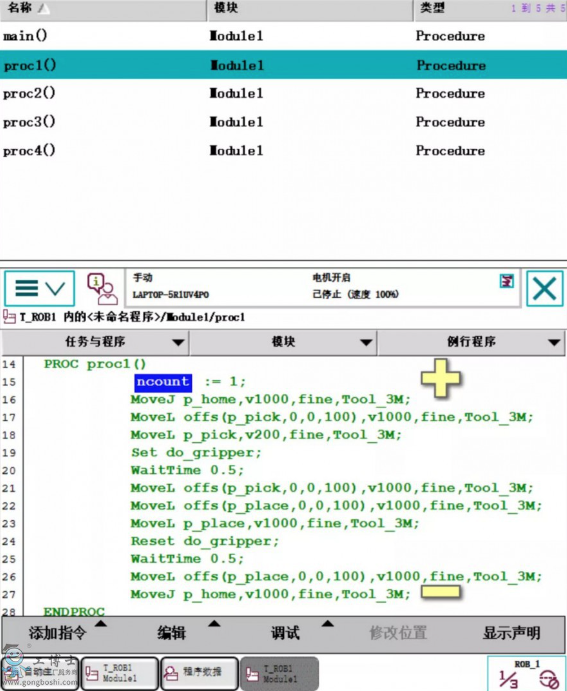
delay(1000); // 延时1秒}2. ABB工业机器人程序编写
rapidMODULE MainModule VAR robtarget pos1 := [[1000,0,500],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; VAR robtarget pos2 := [[800,200,600],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; VAR robtarget pos3 := [[600,400,700],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; PROC Main() ; 移动到初始位置 MoveJ pos1, v1000, z50, tool0; ; 以直线移动到第二个位置 MoveL pos2, v500, z10, tool0; ; 以直线移动到第三个位置 MoveL pos3, v500, z10, tool0; ENDPROC ENDMODULE
3. ROS机器人开发
python#!/usr/bin/env pythonimport rospyfrom geometry_msgs.msg import Twistdef move_robot():
rospy.init_node('robot_mover', anonymous=True)
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
twist = Twist()
twist.linear.x = 0.5 # 向前移动
twist.angular.z = 0.2 # 顺时针旋转
pub.publish(twist)
rate.sleep()if __name__ == '__main__':
try:
move_robot()
except rospy.ROSInterruptException:
pass三、编写机器人程序的步骤
明确机器人的目标功能和应用环境。
绘制机器人的初步草图和布局。
选择合适的材料和技术方案,包括电机类型、传感器配置和电路设计。
搭建机器人的物理结构,连接传感器、控制器和执行器。
编写基本的运动控制程序,处理传感器数据,实现通信协议。
确认基本功能模块是否正常运行,调整参数以提高性能。
四、常见问题及解决方案
不同组件间可能存在兼容性问题,可以通过仔细阅读技术规格和使用适配器来解决。
调试是必不可少的一步,可以通过逐步测试和使用调试工具来定位和解决问题。
机器人在不同环境中可能表现不佳,需要通过调节参数和微调硬件来解决。